![]()
![]()
![]()
![]()
|
|
|
|
|
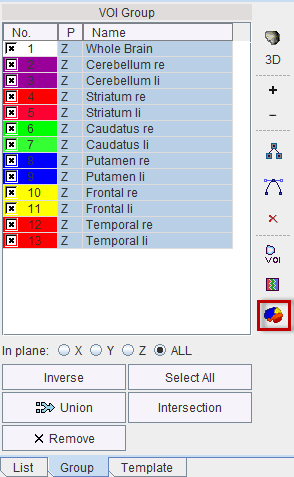
An image series for which a set of contour VOIs has been defined can easily be converted into a VOI atlas as follows:
A dialog window appears which requests an Atlas name for template.
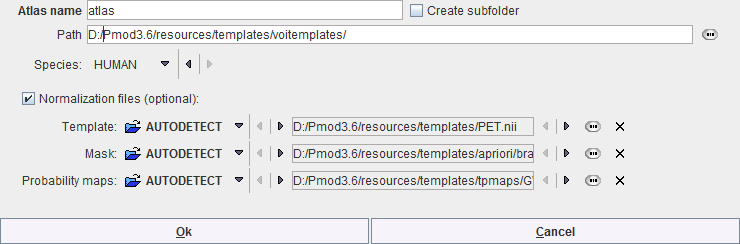
Using this name a subdirectory is created in the Path directory which defaults to resources/templates/voitemplates, but which can be changed. The Species selection allows tagging the VOI atlas so that it will be shown in the corresponding context.
An image series is generated which encodes each VOI pixel as an appropriate numeric label and saved in NifTI format. Additionally, a text file is created for the mapping of the numeric labels to VOI names. After activating the refresh button  in the Atlas panel of Template, the new template appears and can be used for statistics.
in the Atlas panel of Template, the new template appears and can be used for statistics.
Important: Because of the each pixel can only have one numeric label, the VOIs used for the Atlas generation may not be overlapping.
Optionally, files for the spatial normalization can be defined for the template. To this end enable the Normalization files (optional) box and select a Template file and a Mask file, which will be used for the deformable registration. To also use the Probability Maps Normalization a Probability maps file should be selected which encodes the Grey matter, white matter and CSF probability maps as a dynamic data set. In this case, a normalization folder is created with the normalization image in NifTI format (norm_template.nii). It also contains a mask sub-folder for the mask image (mask.nii), and a tpm folder for the tissue probability map (tpm.nii).